Solver for Ordinary Differential Equations (ODE), Switching Automatically Between Stiff and Non-stiff Methods
lsoda.RdSolving initial value problems for stiff or non-stiff systems of first-order ordinary differential equations (ODEs).
The R function lsoda provides an interface to the FORTRAN ODE
solver of the same name, written by Linda R. Petzold and Alan
C. Hindmarsh.
The system of ODE's is written as an R function (which may, of
course, use .C, .Fortran,
.Call, etc., to call foreign code) or be defined in
compiled code that has been dynamically loaded. A vector of
parameters is passed to the ODEs, so the solver may be used as part of
a modeling package for ODEs, or for parameter estimation using any
appropriate modeling tool for non-linear models in R such as
optim, nls, nlm or
nlme
lsoda differs from the other integrators (except lsodar)
in that it switches automatically between stiff and nonstiff methods.
This means that the user does not have to determine whether the
problem is stiff or not, and the solver will automatically choose the
appropriate method. It always starts with the nonstiff method.
lsoda(y, times, func, parms, rtol = 1e-6, atol = 1e-6,
jacfunc = NULL, jactype = "fullint", rootfunc = NULL,
verbose = FALSE, nroot = 0, tcrit = NULL,
hmin = 0, hmax = NULL, hini = 0, ynames = TRUE,
maxordn = 12, maxords = 5, bandup = NULL, banddown = NULL,
maxsteps = 5000, dllname = NULL, initfunc = dllname,
initpar = parms, rpar = NULL, ipar = NULL, nout = 0,
outnames = NULL, forcings = NULL, initforc = NULL,
fcontrol = NULL, events = NULL, lags = NULL,...)Arguments
- y
the initial (state) values for the ODE system. If
yhas a name attribute, the names will be used to label the output matrix.- times
times at which explicit estimates for
yare desired. The first value intimesmust be the initial time.- func
either an R-function that computes the values of the derivatives in the ODE system (the model definition) at time t, or a character string giving the name of a compiled function in a dynamically loaded shared library, or a list of symbols returned by
checkDLL.If
funcis an R-function, it must be defined as:func <- function(t, y, parms,...).tis the current time point in the integration,yis the current estimate of the variables in the ODE system. If the initial valuesyhas anamesattribute, the names will be available insidefunc.parmsis a vector or list of parameters; ... (optional) are any other arguments passed to the function.The return value of
funcshould be a list, whose first element is a vector containing the derivatives ofywith respect totime, and whose next elements are global values that are required at each point intimes. The derivatives must be specified in the same order as the state variablesy.If
funcis a string, thendllnamemust give the name of the shared library (without extension) which must be loaded beforelsoda()is called. See package vignette"compiledCode"for more details.funccan also be a list of symbols returned bycheckDLLto avoid overhead from repeated internal calls to this function. It is an experimental feature for special situations, when a small compiled model with a low number of integration steps is repeatedly called. It is currently only available for thelsodasolver, see example.- parms
vector or list of parameters used in
funcorjacfunc.- rtol
relative error tolerance, either a scalar or an array as long as
y. See details.- atol
absolute error tolerance, either a scalar or an array as long as
y. See details.- jacfunc
if not
NULL, an R function, that computes the Jacobian of the system of differential equations \(\partial\dot{y}_i/\partial y_j\), or a string giving the name of a function or subroutine indllnamethat computes the Jacobian (see vignette"compiledCode"for more about this option).In some circumstances, supplying
jacfunccan speed up the computations, if the system is stiff. The R calling sequence forjacfuncis identical to that offunc.If the Jacobian is a full matrix,
jacfuncshould return a matrix \(\partial\dot{y}/\partial y\), where the ith row contains the derivative of \(dy_i/dt\) with respect to \(y_j\), or a vector containing the matrix elements by columns (the way R and FORTRAN store matrices).If the Jacobian is banded,
jacfuncshould return a matrix containing only the nonzero bands of the Jacobian, rotated row-wise. See first example of lsode.- jactype
the structure of the Jacobian, one of
"fullint","fullusr","bandusr"or"bandint"- either full or banded and estimated internally or by user.- rootfunc
if not
NULL, an R function that computes the function whose root has to be estimated or a string giving the name of a function or subroutine indllnamethat computes the root function. The R calling sequence forrootfuncis identical to that offunc.rootfuncshould return a vector with the function values whose root is sought. Whenrootfuncis provided, thenlsodarwill be called.- verbose
if
TRUE: full output to the screen, e.g. will print thediagnostiscsof the integration - see details.- nroot
only used if
dllnameis specified: the number of constraint functions whose roots are desired during the integration; ifrootfuncis an R-function, the solver estimates the number of roots.- tcrit
if not
NULL, thenlsodacannot integrate pasttcrit. The FORTRAN routinelsodaovershoots its targets (times points in the vectortimes), and interpolates values for the desired time points. If there is a time beyond which integration should not proceed (perhaps because of a singularity), that should be provided intcrit.- hmin
an optional minimum value of the integration stepsize. In special situations this parameter may speed up computations with the cost of precision. Don't use
hminif you don't know why!- hmax
an optional maximum value of the integration stepsize. If not specified,
hmaxis set to the largest difference intimes, to avoid that the simulation possibly ignores short-term events. If 0, no maximal size is specified.- hini
initial step size to be attempted; if 0, the initial step size is determined by the solver.
- ynames
logical, if
FALSE: names of state variables are not passed to functionfunc; this may speed up the simulation especially for large models.- maxordn
the maximum order to be allowed in case the method is non-stiff. Should be <= 12. Reduce
maxordto save storage space.- maxords
the maximum order to be allowed in case the method is stiff. Should be <= 5. Reduce maxord to save storage space.
- bandup
number of non-zero bands above the diagonal, in case the Jacobian is banded.
- banddown
number of non-zero bands below the diagonal, in case the Jacobian is banded.
- maxsteps
maximal number of steps per output interval taken by the solver.
- dllname
a string giving the name of the shared library (without extension) that contains all the compiled function or subroutine definitions refered to in
funcandjacfunc. See package vignette"compiledCode".- initfunc
if not
NULL, the name of the initialisation function (which initialises values of parameters), as provided indllname. See package vignette"compiledCode".- initpar
only when
dllnameis specified and an initialisation functioninitfuncis in the dll: the parameters passed to the initialiser, to initialise the common blocks (FORTRAN) or global variables (C, C++).- rpar
only when
dllnameis specified: a vector with double precision values passed to the dll-functions whose names are specified byfuncandjacfunc.- ipar
only when
dllnameis specified: a vector with integer values passed to the dll-functions whose names are specified byfuncandjacfunc.- nout
only used if
dllnameis specified and the model is defined in compiled code: the number of output variables calculated in the compiled functionfunc, present in the shared library. Note: it is not automatically checked whether this is indeed the number of output variables calculated in the dll - you have to perform this check in the code. See package vignette"compiledCode".- outnames
only used if
dllnameis specified andnout> 0: the names of output variables calculated in the compiled functionfunc, present in the shared library. These names will be used to label the output matrix.- forcings
only used if
dllnameis specified: a list with the forcing function data sets, each present as a two-columned matrix, with (time,value); interpolation outside the interval [min(times), max(times)] is done by taking the value at the closest data extreme.See forcings or package vignette
"compiledCode".- initforc
if not
NULL, the name of the forcing function initialisation function, as provided indllname. It MUST be present ifforcingshas been given a value. See forcings or package vignette"compiledCode".- fcontrol
A list of control parameters for the forcing functions. See forcings or vignette
compiledCode.- events
A matrix or data frame that specifies events, i.e. when the value of a state variable is suddenly changed. See events for more information.
- lags
A list that specifies timelags, i.e. the number of steps that has to be kept. To be used for delay differential equations. See timelags, dede for more information.
- ...
additional arguments passed to
funcandjacfuncallowing this to be a generic function.
Value
A matrix of class deSolve with up to as many rows as elements
in times and as many columns as elements in y plus the number of "global"
values returned in the next elements of the return from func,
plus and additional column for the time value. There will be a row
for each element in times unless the FORTRAN routine `lsoda'
returns with an unrecoverable error. If y has a names
attribute, it will be used to label the columns of the output value.
References
Hindmarsh, Alan C. (1983) ODEPACK, A Systematized Collection of ODE Solvers; in p.55–64 of Stepleman, R.W. et al.[ed.] (1983) Scientific Computing, North-Holland, Amsterdam.
Petzold, Linda R. (1983) Automatic Selection of Methods for Solving Stiff and Nonstiff Systems of Ordinary Differential Equations. Siam J. Sci. Stat. Comput. 4, 136–148. doi:10.1137/0904010
Netlib: https://netlib.org
Details
All the hard work is done by the FORTRAN subroutine lsoda,
whose documentation should be consulted for details (it is included as
comments in the source file src/opkdmain.f). The implementation
is based on the 12 November 2003 version of lsoda, from Netlib.
lsoda switches automatically between stiff and nonstiff
methods. This means that the user does not have to determine whether
the problem is stiff or not, and the solver will automatically choose
the appropriate method. It always starts with the nonstiff method.
The form of the Jacobian can be specified by jactype which can
take the following values:
- "fullint"
a full Jacobian, calculated internally by lsoda, the default,
- "fullusr"
a full Jacobian, specified by user function
jacfunc,- "bandusr"
a banded Jacobian, specified by user function
jacfuncthe size of the bands specified bybandupandbanddown,- "bandint"
banded Jacobian, calculated by lsoda; the size of the bands specified by
bandupandbanddown.
If jactype = "fullusr" or "bandusr" then the user must supply a
subroutine jacfunc.
The following description of error control is adapted from the
documentation of the lsoda source code
(input arguments rtol and atol, above):
The input parameters rtol, and atol determine the error
control performed by the solver. The solver will control the vector
e of estimated local errors in y, according to an
inequality of the form max-norm of ( e/ewt ) \(\leq\) 1, where ewt is a vector of positive error weights. The
values of rtol and atol should all be non-negative. The
form of ewt is:
$$\mathbf{rtol} \times \mathrm{abs}(\mathbf{y}) + \mathbf{atol}$$
where multiplication of two vectors is element-by-element.
If the request for precision exceeds the capabilities of the machine,
the FORTRAN subroutine lsoda will return an error code; under some
circumstances, the R function lsoda will attempt a reasonable
reduction of precision in order to get an answer. It will write a
warning if it does so.
The diagnostics of the integration can be printed to screen
by calling diagnostics. If verbose = TRUE,
the diagnostics will written to the screen at the end of the integration.
See vignette("deSolve") for an explanation of each element in the vectors containing the diagnostic properties and how to directly access them.
Models may be defined in compiled C or FORTRAN code, as well as
in an R-function. See package vignette "compiledCode" for details.
More information about models defined in compiled code is in the package vignette ("compiledCode"); information about linking forcing functions to compiled code is in forcings.
Examples in both C and FORTRAN are in the dynload subdirectory
of the deSolve package directory.
See also
lsode, which can also find a rootlsodes,lsodar,vode,daspkfor other solvers of the Livermore family,odefor a general interface to most of the ODE solvers,ode.bandfor solving models with a banded Jacobian,ode.1Dfor integrating 1-D models,ode.2Dfor integrating 2-D models,ode.3Dfor integrating 3-D models,
diagnostics to print diagnostic messages.
Note
The demo directory contains some examples of using
gnls to estimate parameters in a
dynamic model.
Examples
## =======================================================================
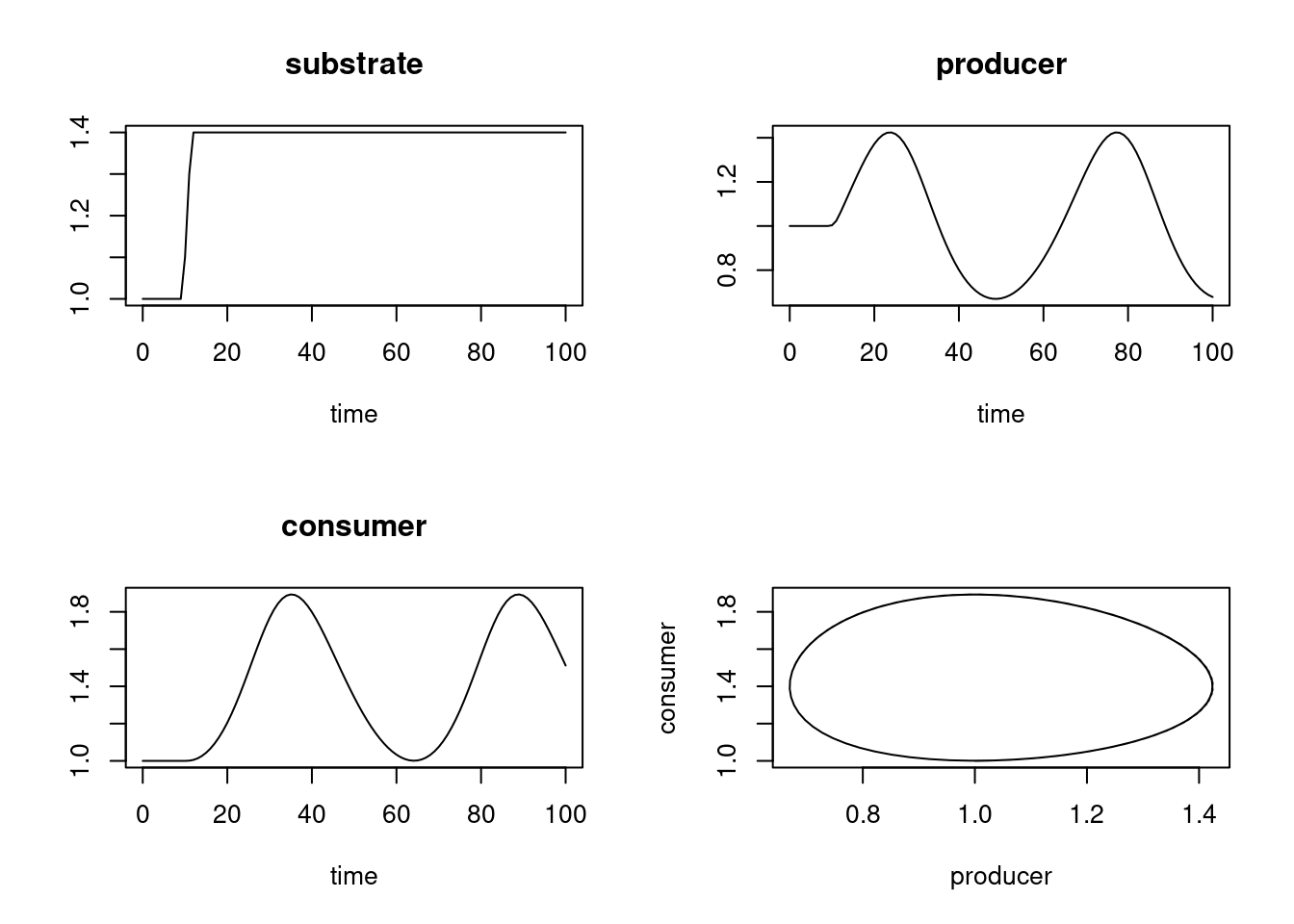
## Example 1:
## A simple resource limited Lotka-Volterra-Model
##
## Note:
## 1. parameter and state variable names made
## accessible via "with" function
## 2. function sigimp accessible through lexical scoping
## (see also ode and rk examples)
## =======================================================================
SPCmod <- function(t, x, parms) {
with(as.list(c(parms, x)), {
import <- sigimp(t)
dS <- import - b*S*P + g*C #substrate
dP <- c*S*P - d*C*P #producer
dC <- e*P*C - f*C #consumer
res <- c(dS, dP, dC)
list(res)
})
}
## Parameters
parms <- c(b = 0.0, c = 0.1, d = 0.1, e = 0.1, f = 0.1, g = 0.0)
## vector of timesteps
times <- seq(0, 100, length = 101)
## external signal with rectangle impulse
signal <- as.data.frame(list(times = times,
import = rep(0,length(times))))
signal$import[signal$times >= 10 & signal$times <= 11] <- 0.2
sigimp <- approxfun(signal$times, signal$import, rule = 2)
## Start values for steady state
y <- xstart <- c(S = 1, P = 1, C = 1)
## Solving
out <- lsoda(xstart, times, SPCmod, parms)
## Plotting
mf <- par("mfrow")
plot(out, main = c("substrate", "producer", "consumer"))
plot(out[,"P"], out[,"C"], type = "l", xlab = "producer", ylab = "consumer")
 par(mfrow = mf)
## =======================================================================
## Example 2:
## from lsoda source code
## =======================================================================
## names makes this easier to read, but may slow down execution.
parms <- c(k1 = 0.04, k2 = 1e4, k3 = 3e7)
my.atol <- c(1e-6, 1e-10, 1e-6)
times <- c(0,4 * 10^(-1:10))
lsexamp <- function(t, y, p) {
yd1 <- -p["k1"] * y[1] + p["k2"] * y[2]*y[3]
yd3 <- p["k3"] * y[2]^2
list(c(yd1, -yd1-yd3, yd3), c(massbalance = sum(y)))
}
exampjac <- function(t, y, p) {
matrix(c(-p["k1"], p["k1"], 0,
p["k2"]*y[3],
- p["k2"]*y[3] - 2*p["k3"]*y[2],
2*p["k3"]*y[2],
p["k2"]*y[2], -p["k2"]*y[2], 0
), 3, 3)
}
## measure speed (here and below)
system.time(
out <- lsoda(c(1, 0, 0), times, lsexamp, parms, rtol = 1e-4,
atol = my.atol, hmax = Inf)
)
#> user system elapsed
#> 0.005 0.000 0.005
out
#> time 1 2 3 massbalance
#> 1 0e+00 1.000000e+00 0.000000e+00 0.00000000 1
#> 2 4e-01 9.851712e-01 3.386380e-05 0.01479493 1
#> 3 4e+00 9.055333e-01 2.240655e-05 0.09444430 1
#> 4 4e+01 7.158403e-01 9.186334e-06 0.28415047 1
#> 5 4e+02 4.505250e-01 3.222964e-06 0.54947175 1
#> 6 4e+03 1.831976e-01 8.941774e-07 0.81680155 1
#> 7 4e+04 3.898729e-02 1.621940e-07 0.96101254 1
#> 8 4e+05 4.936362e-03 1.984221e-08 0.99506362 1
#> 9 4e+06 5.161832e-04 2.065786e-09 0.99948381 1
#> 10 4e+07 5.179808e-05 2.072029e-10 0.99994820 1
#> 11 4e+08 5.283591e-06 2.113447e-11 0.99999472 1
#> 12 4e+09 4.658821e-07 1.863529e-12 0.99999953 1
#> 13 4e+10 1.426830e-08 5.707325e-14 0.99999999 1
## This is what the authors of lsoda got for the example:
## the output of this program (on a cdc-7600 in single precision)
## is as follows..
##
## at t = 4.0000e-01 y = 9.851712e-01 3.386380e-05 1.479493e-02
## at t = 4.0000e+00 y = 9.055333e-01 2.240655e-05 9.444430e-02
## at t = 4.0000e+01 y = 7.158403e-01 9.186334e-06 2.841505e-01
## at t = 4.0000e+02 y = 4.505250e-01 3.222964e-06 5.494717e-01
## at t = 4.0000e+03 y = 1.831975e-01 8.941774e-07 8.168016e-01
## at t = 4.0000e+04 y = 3.898730e-02 1.621940e-07 9.610125e-01
## at t = 4.0000e+05 y = 4.936363e-03 1.984221e-08 9.950636e-01
## at t = 4.0000e+06 y = 5.161831e-04 2.065786e-09 9.994838e-01
## at t = 4.0000e+07 y = 5.179817e-05 2.072032e-10 9.999482e-01
## at t = 4.0000e+08 y = 5.283401e-06 2.113371e-11 9.999947e-01
## at t = 4.0000e+09 y = 4.659031e-07 1.863613e-12 9.999995e-01
## at t = 4.0000e+10 y = 1.404280e-08 5.617126e-14 1.000000e+00
## Using the analytic Jacobian speeds up execution a little :
system.time(
outJ <- lsoda(c(1, 0, 0), times, lsexamp, parms, rtol = 1e-4,
atol = my.atol, jacfunc = exampjac, jactype = "fullusr", hmax = Inf)
)
#> user system elapsed
#> 0.01 0.00 0.01
all.equal(as.data.frame(out), as.data.frame(outJ)) # TRUE
#> [1] TRUE
diagnostics(out)
#>
#> --------------------
#> lsoda return code
#> --------------------
#>
#> return code (idid) = 2
#> Integration was successful.
#>
#> --------------------
#> INTEGER values
#> --------------------
#>
#> 1 The return code : 2
#> 2 The number of steps taken for the problem so far: 361
#> 3 The number of function evaluations for the problem so far: 693
#> 5 The method order last used (successfully): 1
#> 6 The order of the method to be attempted on the next step: 1
#> 7 If return flag =-4,-5: the largest component in error vector 0
#> 8 The length of the real work array actually required: 68
#> 9 The length of the integer work array actually required: 23
#> 14 The number of Jacobian evaluations and LU decompositions so far: 64
#> 15 The method indicator for the last succesful step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#> 16 The current method indicator to be attempted on the next step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#>
#> --------------------
#> RSTATE values
#> --------------------
#>
#> 1 The step size in t last used (successfully): 44020830000
#> 2 The step size to be attempted on the next step: 44020830000
#> 3 The current value of the independent variable which the solver has reached: 64822650000
#> 4 Tolerance scale factor > 1.0 computed when requesting too much accuracy: 0
#> 5 The value of t at the time of the last method switch, if any: 0.006009229
#>
diagnostics(outJ) # shows what lsoda did internally
#>
#> --------------------
#> lsoda return code
#> --------------------
#>
#> return code (idid) = 2
#> Integration was successful.
#>
#> --------------------
#> INTEGER values
#> --------------------
#>
#> 1 The return code : 2
#> 2 The number of steps taken for the problem so far: 361
#> 3 The number of function evaluations for the problem so far: 501
#> 5 The method order last used (successfully): 1
#> 6 The order of the method to be attempted on the next step: 1
#> 7 If return flag =-4,-5: the largest component in error vector 0
#> 8 The length of the real work array actually required: 68
#> 9 The length of the integer work array actually required: 23
#> 14 The number of Jacobian evaluations and LU decompositions so far: 64
#> 15 The method indicator for the last succesful step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#> 16 The current method indicator to be attempted on the next step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#>
#> --------------------
#> RSTATE values
#> --------------------
#>
#> 1 The step size in t last used (successfully): 44025240000
#> 2 The step size to be attempted on the next step: 44025240000
#> 3 The current value of the independent variable which the solver has reached: 64828600000
#> 4 Tolerance scale factor > 1.0 computed when requesting too much accuracy: 0
#> 5 The value of t at the time of the last method switch, if any: 0.006009229
#>
par(mfrow = mf)
## =======================================================================
## Example 2:
## from lsoda source code
## =======================================================================
## names makes this easier to read, but may slow down execution.
parms <- c(k1 = 0.04, k2 = 1e4, k3 = 3e7)
my.atol <- c(1e-6, 1e-10, 1e-6)
times <- c(0,4 * 10^(-1:10))
lsexamp <- function(t, y, p) {
yd1 <- -p["k1"] * y[1] + p["k2"] * y[2]*y[3]
yd3 <- p["k3"] * y[2]^2
list(c(yd1, -yd1-yd3, yd3), c(massbalance = sum(y)))
}
exampjac <- function(t, y, p) {
matrix(c(-p["k1"], p["k1"], 0,
p["k2"]*y[3],
- p["k2"]*y[3] - 2*p["k3"]*y[2],
2*p["k3"]*y[2],
p["k2"]*y[2], -p["k2"]*y[2], 0
), 3, 3)
}
## measure speed (here and below)
system.time(
out <- lsoda(c(1, 0, 0), times, lsexamp, parms, rtol = 1e-4,
atol = my.atol, hmax = Inf)
)
#> user system elapsed
#> 0.005 0.000 0.005
out
#> time 1 2 3 massbalance
#> 1 0e+00 1.000000e+00 0.000000e+00 0.00000000 1
#> 2 4e-01 9.851712e-01 3.386380e-05 0.01479493 1
#> 3 4e+00 9.055333e-01 2.240655e-05 0.09444430 1
#> 4 4e+01 7.158403e-01 9.186334e-06 0.28415047 1
#> 5 4e+02 4.505250e-01 3.222964e-06 0.54947175 1
#> 6 4e+03 1.831976e-01 8.941774e-07 0.81680155 1
#> 7 4e+04 3.898729e-02 1.621940e-07 0.96101254 1
#> 8 4e+05 4.936362e-03 1.984221e-08 0.99506362 1
#> 9 4e+06 5.161832e-04 2.065786e-09 0.99948381 1
#> 10 4e+07 5.179808e-05 2.072029e-10 0.99994820 1
#> 11 4e+08 5.283591e-06 2.113447e-11 0.99999472 1
#> 12 4e+09 4.658821e-07 1.863529e-12 0.99999953 1
#> 13 4e+10 1.426830e-08 5.707325e-14 0.99999999 1
## This is what the authors of lsoda got for the example:
## the output of this program (on a cdc-7600 in single precision)
## is as follows..
##
## at t = 4.0000e-01 y = 9.851712e-01 3.386380e-05 1.479493e-02
## at t = 4.0000e+00 y = 9.055333e-01 2.240655e-05 9.444430e-02
## at t = 4.0000e+01 y = 7.158403e-01 9.186334e-06 2.841505e-01
## at t = 4.0000e+02 y = 4.505250e-01 3.222964e-06 5.494717e-01
## at t = 4.0000e+03 y = 1.831975e-01 8.941774e-07 8.168016e-01
## at t = 4.0000e+04 y = 3.898730e-02 1.621940e-07 9.610125e-01
## at t = 4.0000e+05 y = 4.936363e-03 1.984221e-08 9.950636e-01
## at t = 4.0000e+06 y = 5.161831e-04 2.065786e-09 9.994838e-01
## at t = 4.0000e+07 y = 5.179817e-05 2.072032e-10 9.999482e-01
## at t = 4.0000e+08 y = 5.283401e-06 2.113371e-11 9.999947e-01
## at t = 4.0000e+09 y = 4.659031e-07 1.863613e-12 9.999995e-01
## at t = 4.0000e+10 y = 1.404280e-08 5.617126e-14 1.000000e+00
## Using the analytic Jacobian speeds up execution a little :
system.time(
outJ <- lsoda(c(1, 0, 0), times, lsexamp, parms, rtol = 1e-4,
atol = my.atol, jacfunc = exampjac, jactype = "fullusr", hmax = Inf)
)
#> user system elapsed
#> 0.01 0.00 0.01
all.equal(as.data.frame(out), as.data.frame(outJ)) # TRUE
#> [1] TRUE
diagnostics(out)
#>
#> --------------------
#> lsoda return code
#> --------------------
#>
#> return code (idid) = 2
#> Integration was successful.
#>
#> --------------------
#> INTEGER values
#> --------------------
#>
#> 1 The return code : 2
#> 2 The number of steps taken for the problem so far: 361
#> 3 The number of function evaluations for the problem so far: 693
#> 5 The method order last used (successfully): 1
#> 6 The order of the method to be attempted on the next step: 1
#> 7 If return flag =-4,-5: the largest component in error vector 0
#> 8 The length of the real work array actually required: 68
#> 9 The length of the integer work array actually required: 23
#> 14 The number of Jacobian evaluations and LU decompositions so far: 64
#> 15 The method indicator for the last succesful step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#> 16 The current method indicator to be attempted on the next step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#>
#> --------------------
#> RSTATE values
#> --------------------
#>
#> 1 The step size in t last used (successfully): 44020830000
#> 2 The step size to be attempted on the next step: 44020830000
#> 3 The current value of the independent variable which the solver has reached: 64822650000
#> 4 Tolerance scale factor > 1.0 computed when requesting too much accuracy: 0
#> 5 The value of t at the time of the last method switch, if any: 0.006009229
#>
diagnostics(outJ) # shows what lsoda did internally
#>
#> --------------------
#> lsoda return code
#> --------------------
#>
#> return code (idid) = 2
#> Integration was successful.
#>
#> --------------------
#> INTEGER values
#> --------------------
#>
#> 1 The return code : 2
#> 2 The number of steps taken for the problem so far: 361
#> 3 The number of function evaluations for the problem so far: 501
#> 5 The method order last used (successfully): 1
#> 6 The order of the method to be attempted on the next step: 1
#> 7 If return flag =-4,-5: the largest component in error vector 0
#> 8 The length of the real work array actually required: 68
#> 9 The length of the integer work array actually required: 23
#> 14 The number of Jacobian evaluations and LU decompositions so far: 64
#> 15 The method indicator for the last succesful step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#> 16 The current method indicator to be attempted on the next step,
#> 1=adams (nonstiff), 2= bdf (stiff): 2
#>
#> --------------------
#> RSTATE values
#> --------------------
#>
#> 1 The step size in t last used (successfully): 44025240000
#> 2 The step size to be attempted on the next step: 44025240000
#> 3 The current value of the independent variable which the solver has reached: 64828600000
#> 4 Tolerance scale factor > 1.0 computed when requesting too much accuracy: 0
#> 5 The value of t at the time of the last method switch, if any: 0.006009229
#>